
L’utilizzo del GPS in modalità DGPS (sia essa RTK o PP) in ambito topografico è soggetto ad errori di accuratezza molto maggiori rispetto a quelli di precisione.
L’errore di accuratezza, normalmente, viene risolto con una traslazione tramite un punto noto.
Per natura però il GPS non rileva sempre con la stessa precisione. La precisione cambia nel tempo, assecondando molti fattori tra cui anche la piombatura dell’operatore.
Se ci fosse più di una scelta per la traslazione ovvero, se ci fossero più punti noti usabili, ciascuno sarebbe misurato con una precisione diversa: in alcuni casi migliore della media e in alcuni casi peggiore della media.
Alcuni punti, infatti, vengono misurati con un errore di circa 1 cm altri, con un errore di circa 3 cm: ci siamo chiesti perché non scegliere solo i migliori per gestire le traslazione dei vertici GPS?
Seguendo questo ragionamento, nel 2008 abbiamo sviluppato CSV2ALL, nostro software ad uso interno capace di effettuare la reiterazione dei perni tramite le letture GPS.
CSV2ALL può importare le coordinate di punti noti: siano essi provenienti da GPS, misurati con stazione totale o certificati da terzi (ad esempio dall’IGM).
Per iniziare si può importare la prima campagna GPS, applicando una traslazione secondo uno dei punti noti di quella campagna, risolvendo l’errore di accuratezza in quel sistema di coordinate; oppure, si può decidere di non applicarne traslazioni e utilizzare le coordinate GPS di un punto specifico conservando la coordinata di campagna e quindi, l’errore di accuratezza.
Nel caso presentato al nostro software sono stati dati in pasto 9 campagne GPS ed è stato chiesto al software di unire tali campagne senza un punto noto iniziale.
Ogni volta che una campagna condivide più di un punto noto con i dati di base o con le altre campagne, vi è la reiterazione dei perni.
La reiterazione dei perni consiste nel provare ad utilizzare come perno ciascun punto noto e calcolare gli scarti che ne deriverebbero, verso gli altri punti noti standard e derivati (misurati dalle delle altre campagne GPS). Ogni nuovo punto in comune tra più campagne GPS può essere considerato un punto noto derivato e può partecipare alla reiterazione descritta.
Tra tutte le combinazioni possibili CSV2ALL suggerisce il perno migliore: quello che determina la trasformazione e che permette gli scarti più bassi (i migliori residui) verso gli altri punti noti.

Questa prassi, non solo consente di scovare e disattivare punti noti con misure non ridondanti ma, permette di scegliere le trasformazioni, così da attenuare la propagazione dell’errore tra più campagne GPS.
I risultati sono apprezzabili: alcune trasformazioni restituiscono scarti tendenti al doppio o al triplo rispetto alla migliore trasformazione scelta dal software.
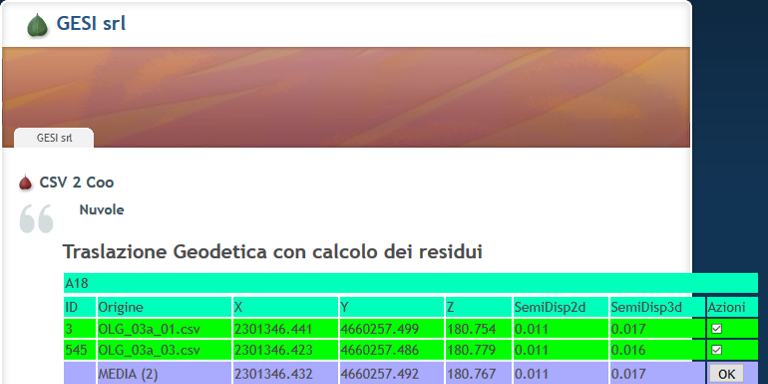
Inoltre se un singolo punto noto derivato viene misurato più volte durante più campagne, CSV2ALL mostra tutte le letture, la loro media e, la dispersione delle misure rispetto alla loro media nella schermata “nuvole”.
Nel 2008, il termine “nuvole” non era abusato come oggi, ma era già parte della cultura LiDAR.

Una volta importate tutte le campagne GPS passando alla schermata “nuvole” di CSV2ALL, si visualizzano le medie e gli scarti 2d e 3d di ciascun punto noto standard e punto noto derivato (quelli condivisi tra più campagne).
La funzione “nuvole” ci offre dati importanti: possiamo sapere quali sono i vertici più affidabili e quali sono quelli con un errore pieno (magari doppio o triplo rispetto alla maggior parte dei casi). I vertici problematici, possono divenire oggetto di intervento per aumentare la qualità della misura.
L’utilizzo di CSV2ALL, diventato prassi aziendale, ci ha consentito nel tempo di avere esperienza sulle indicazioni dei diversi modelli di GPS di cui disponiamo, così da utilizzare ciascuno per la propria vocazione specifica. Questa prassi, inoltre, ci permette di fondere ogni giorno i rilievi topografici effettuati con GPS con quelli effettuati tramite Stazione Totale, verificando che l’accuratezza finale rientri nei limiti richiesti.
Dal primo giorno del suo sviluppo, nel 2008, CSV2ALL è sempre stato una WebApp e ciò ci ha permesso di riversare i dati in basi di dati geospaziali per l’effettuazione di calcoli veloci direttamente da parte del server, potendo inviare i dati persino dai cellulari dell’epoca.
Anche le funzioni accessorie ci hanno addolcito la vita lavorativa: nel 2009 implementammo l’automatismo che disegnava automaticamente le linee di discontinuità sulla base dei nostri codici tematici e, la funzione per calcolare il quarto punto delle sagome quadrangolari (come i pozzetti).
Poco più tardi, nel 2011, sviluppammo la funzione per generare le linee che costituiscono il modello matematico 3d dei muri e dei manufatti.
Nel 2012, inoltre, CSV2ALL è stato arricchito con la funzione “diradamento”. Questa funzione, come si può notare nell’immagine successiva, ci consente di produrre files CAD utili per la stampa, capaci di mostrare quote leggibili e non sovrapposte per una data scala rispettando anche una lista di priorità basata sulla codifica numerica.
Lo sviluppo di CSV2ALL è vivo: si può notare come nel tempo il software sia stato arricchito con svariate funzioni, nell’ottica di migliorare la consegna del rilievo topografico e degli elaborati che ne derivano.
Negli ultimi 10 anni lo sviluppo di CSV2ALL ci ha permesso di approfondire e capire le problematiche interne alle tecnologie che usiamo tutti i giorni, trovando i migliori modi per attenuare l’errore; l’uso di questo prodotto per 10 anni, tra l’altro, ha significato molto per noi: avere sempre a portata di mano gli errori e gli scarti ci ha permesso di migliorare la qualità dei nostri rilievi topografici con GPS e il nostro prodotto finale.