
Differential GPS (DGPS) was created for security reasons, given the excessive accuracy attainable by the GPS system since always.
The U.S. Department of Defense introduced an intentional accuracy degradation system called Selective Availability, which was capable of providing nonmilitary receivers with performance that was still sufficient for many applications of practical interest but, significantly lower than theoretical performance. After the introduction of SA, the system’s error grew to such high levels that it stimulated the search for solutions to compensate for it.
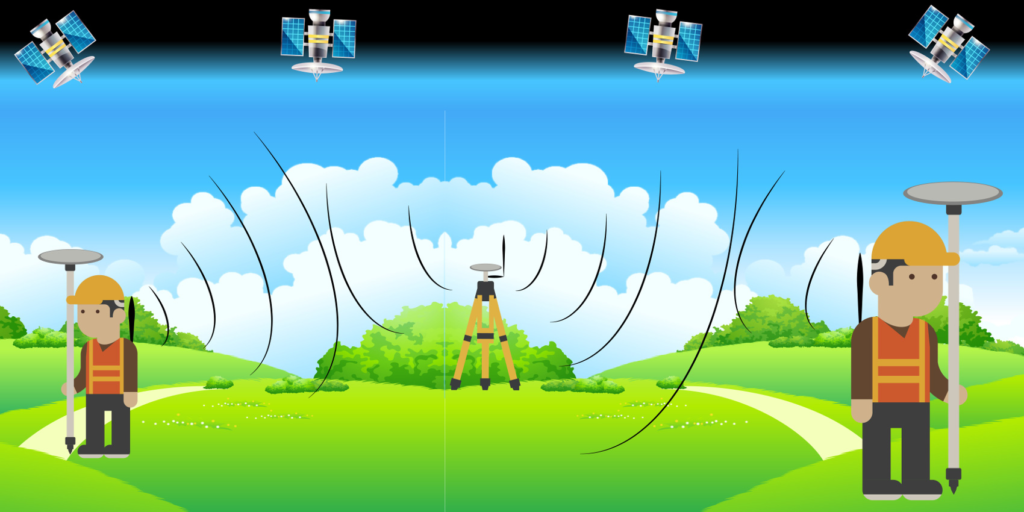
It soon became clear that this would be possible with an ingenious scheme called differential GPS (DGPS), which requires the use of at least 2 GPS receivers.
One of the two receivers is labeled “Reference” (Reference) and positioned for the duration of operations on a fixed point with known coordinates. The other receiver called “Mobile” (Rover), is free to move.
It is assumed that the error is the same for both receivers therefore, knowing their intensity and direction, we can calculate the correct Mobile receiver positions.
Calculating the error is extremely easy: the position of the GPS “Reference” is equal to the actual coordinates plus the induced error, so knowing the actual coordinates with a simple subtraction determines the error.
By subtracting the error from the coordinates read by the “Mobile” GPS we obtain, also on this, the actual coordinates.
This procedure, not only can be used to mitigate the error induced by the SA (no longer in operation today) but, it also mitigates physiological errors in the system that is very precise but not accurate.
In short, the DGPS offers improvement of GPS performance through the transmission of additional data.
Such supplementary data can be transmitted from ground stations or from Satellite. The closer the reference station is, the more similar the calculated error is to that of the mobile system. As they are near, ideally, they share the same environmental interference. In fact, one of the errors is that the atmosphere and ionosphere, depending on their composition, vary the propagation speed of radio waves and induce an error.
The main satellite systems implementing the concept of differential GPS via supplementary data sent by Satellite are the American WAAS (Wide Area AugmentationSystem), in service since July 2003, and the European EGNOS (European Geostationary Navigation Overlay Service), which has entered its final testing phase. Japan is also developing its own very similar system called MSAS.