
In topographic applications, the use of GPS in DGPS mode (whether RTK or PP) is subject to much greater accuracy errors than precision errors.
The accuracy error is normally solved by moving through a known point.
Due to its nature, however, GPS does not always survey with the same accuracy. Accuracy changes over time, indulging many different conditions including the operator’s plumbness.
If there were more usable known points, each one would be measured with different accuracy: in some cases better than average and in some cases worse than average.
In fact, some points are measured with an error of about 1 cm while others with an error of about 3 cm: we wondered why not choose only the best ones to handle GPS vertex translation?
Following this thought, we developed CSV2ALL in 2008, our own software for internal use capable of performing pin reiteration using GPS readings.
CSV2ALL can import the coordinates of known points: whether from GPS, measured by total station, or certified by a third party (e.g., from the IGM).
To start, we can import the first GPS campaign, applying a translation according to one of the known points in that campaign, solving the accuracy error in that coordinate system; or, we can decide to not apply translations and use the GPS coordinates of a specific point while preserving the campaign coordinate and thus, the accuracy error.
In the presented scenario our software was given 9 GPS campaigns, and the software was asked to merge these campaigns without an initial known point.
Whenever a campaign shares more than one known point with the baseline data or with other campaigns, there is reiteration of pivots.
Pivot reiteration consists of trying to use each known point as a pivot and calculating the deviations that would result, to the other standard and derived known points (measured by the of the other GPS campaigns). Each new point in common between multiple GPS campaigns can be considered as a derived known point and can take part in the described reiteration.
Among all possible combinations CSV2ALL suggests the best pivot: the one that determines the transformation and allows the lowest deviations (the best residuals) to the other known points.

This practice, not only allows for the scouting and deactivation of known points with non-redundant measurements but, allows for the selection of transformations, so as to smooth error propagation among multiple GPS campaigns.
Results are noticeable: some transformations return deviations tending to double or triple the best transformation chosen by the software.
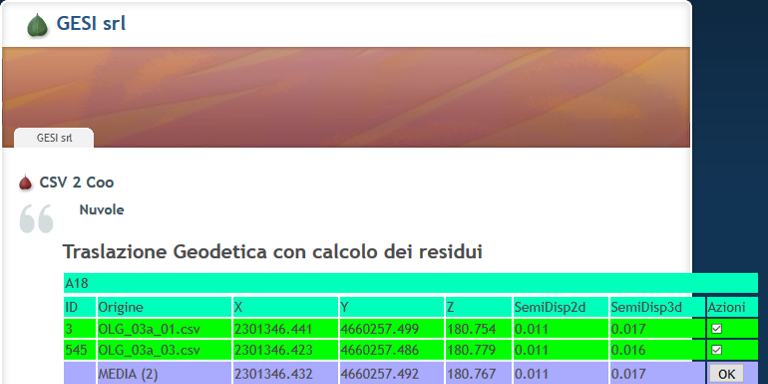
In addition, if a single known derived point is measured multiple times during multiple campaigns, CSV2ALL shows all the readings, their average and, the dispersion of the measurements from their average in the “clouds” screen.
In 2008, the term “clouds” was not overused as it is today, but it was already part of LiDAR culture.

Once all GPS campaigns have been imported by switching to CSV2ALL’s “clouds” screen, the 2d and 3d averages and deviations of each standard known point and derived known point (those shared among multiple campaigns) are displayed.
The “clouds” feature gives us important data: we can know which vertices are the most reliable and which are those with a full error (perhaps double or triple the error in most cases). Those problematic vertices, can become the object of intervention to increase the quality of the measurement.
The use of CSV2ALL, which has become a business practice, has allowed us over time to have experience on the indications of the different GPS models we have, so that we can use each one for its specific vocation. This practice, additionally, allows us to merge the topographic surveys done with GPS with those done by Total Station on a daily basis, verifying that the final accuracy is within the required limits.
From the first day of its development in 2008, CSV2ALL has always been a WebApp, allowing us to pour data into geospatial databases for quick calculations directly from the server, being able to send data even from mobile phones of that era.
Even the additional features made our working life easier: in 2009 we implemented the automatism that automatically drew the lines of discontinuity based on our thematic codes and, the function to calculate the fourth point of quadrangular silhouettes (such as manholes).
A bit later, in 2011, we developed the function to generate the lines that constitute the 3d mathematical model of walls and artifacts.
In 2012, CSV2ALL was also enhanced with the “thinning” function. This function, as can be seen in the next image, allows us to produce CAD files useful for printing, capable of showing readable, non-overlapping dimensions for a given scale while also respecting a priority list based on numerical coding.

The development of CSV2ALL is vivid: it can be seen that over time the software has been enriched with a variety of functions, with a view to improving the delivery of the topographical survey and the resulting deliverables.
Over the past 10 years, the development of CSV2ALL has allowed us to deepen and understand the issues within the technologies we use every day, finding the best ways to smooth out the error; by the way, the use of this product for 10 years has meant a lot to us: having the errors and rejects at hand at all times has allowed us to improve the quality of our GPS topographic surveys and our final product.