
Il GPS differenziale (DGPS) nasce per motivi di sicurezza, data l’eccessiva precisione raggiungibile dal sistema GPS fin dal suo esordio.
Il Dipartimento della Difesa Americano introdusse un sistema di degradazione intenzionale della precisione denominato Selective Availability, capace di fornire ai ricevitori non militari prestazioni ancora sufficienti per molte applicazioni di interesse pratico ma, sensibilmente inferiori a quelle teoriche. Dopo l’introduzione della SA, l’errore del sistema crebbe a livelli talmente alti da stimolare la ricerca di soluzioni per compensarlo.
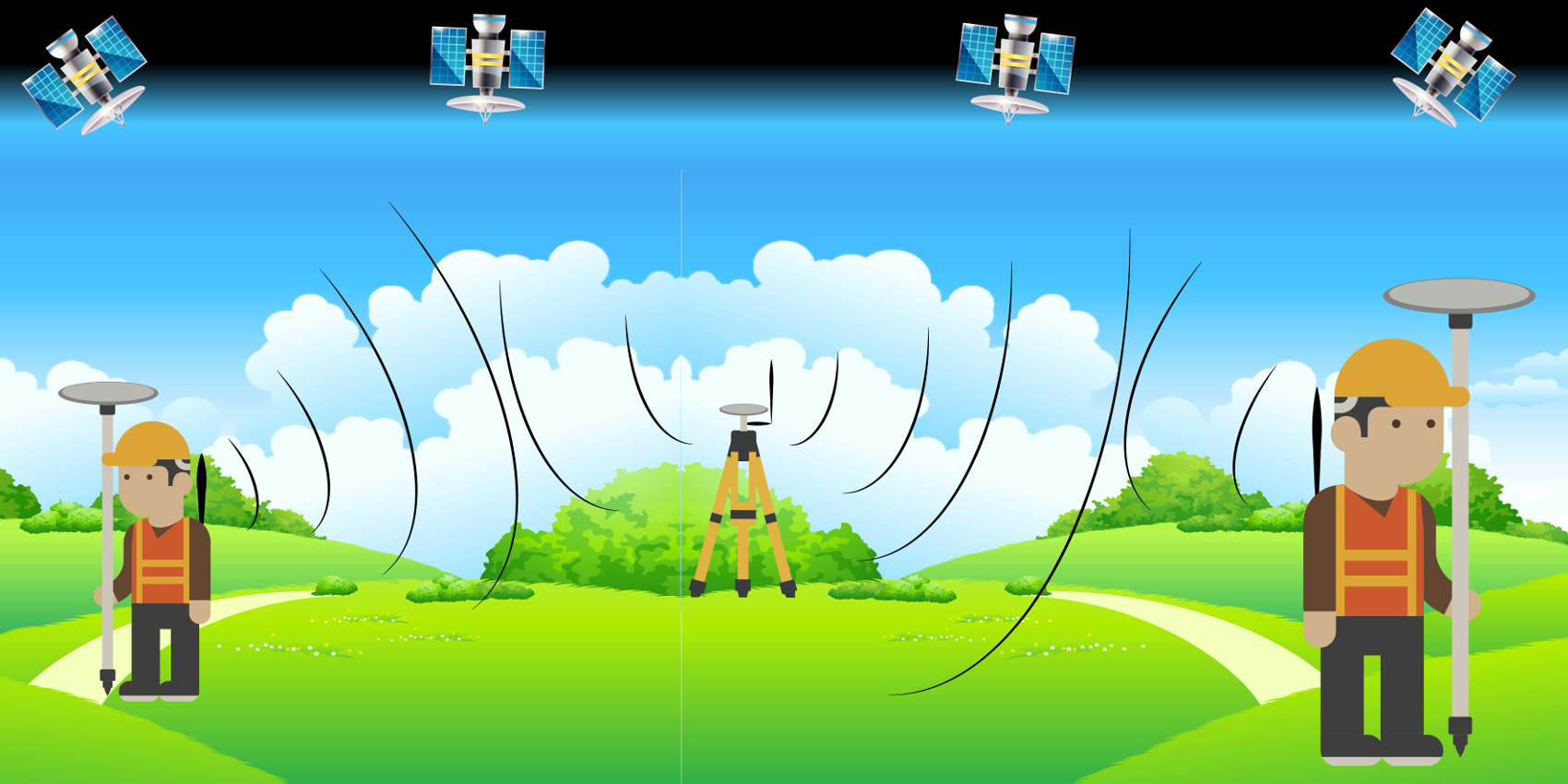
Risultò presto chiaro che ciò sarebbe stato possibile con uno schema ingegnoso, detto GPS differenziale (DGPS), che richiede l’uso di almeno 2 ricevitori GPS.
Uno dei due ricevitori viene etichettato “Riferimento” (Reference) e posizionato per la durata delle operazioni su un punto fisso con coordinate note. L’altro ricevitore detto “Mobile” (Rover), è libero di muoversi.
Si presume che l’errore sia uguale per entrambi i ricevitori pertanto, conoscendone intensità e verso, possiamo calcolare le corrette posizioni del ricevitore Mobile.
Calcolare l’errore è estremamente facile: la posizione del GPS “Riferimento” è uguale alle coordinate reali più l’errore indotto, quindi conoscendo le coordinate reali con una semplice sottrazione si determina l’errore.
Sottraendo l’errore alle coordinate lette dal GPS “Mobile” otteniamo, anche su questo, le coordinate reali.
Questa procedura, non solo può essere usata per attenuare l’errore indotto dalla SA (oggi non più in funzione) ma, attenua anche errori fisiologici del sistema che è molto preciso ma non accurato.
Insomma, il sistema DGPS prevede il miglioramento delle performance del GPS tramite la trasmissione di un dato supplementare.
Tale dato supplementare può essere trasmesso da stazioni a terra o da Satellite. Le performance sono tanto migliori quanto più l’errore viene calcolato vicino al GPS “Mobile” in quanto la stazione di riferimento, in quel caso, condivide le stesse interferenze ambientali. Infatti uno degli errori è dato dal fatto che atmosfera e ionosfera, in base alla propria composizione, variano la velocità di propagazione delle onde radio ed inducono un errore.
I principali sistemi satellitari che implementano il concetto del GPS differenziale tramite dato supplementare inviato da Satellite sono l’americano WAAS (Wide Area AugmentationSystem), in servizio dal luglio 2003, e l’europeo EGNOS (European Geostationary Navigation Overlay Service), entrato in fase finale di test. Anche il Giappone sta sviluppando un suo sistema assai simile denominato MSAS.