
CloudDesigner è l’applicativo per Laser Scanner sviluppato da chi usa il Laser Scanner.
Storia
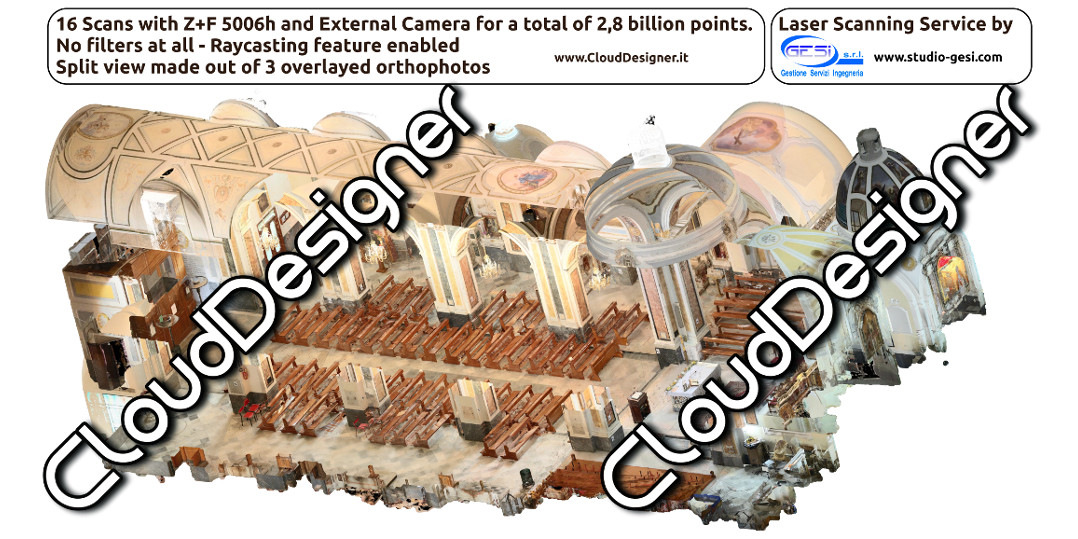
Nel 2013, GESI ha acquistato il migliore laser scanner in commercio, uno Z+F 5006h. Nonostante l’ingente investimento di risorse, il software acquistato a corredo era ben lontano dalle aspettative infatti, i tempi per il trattamento dei dati erano interminabili e le procedure erano tutt’altro che rigorose.
Per poter lavorare in tempi decenti, per ragioni tecniche e su indicazione del fornitore del software, c’era bisogno di una decimazione dei punti. Da tale decimazione derivava inesorabilmente un risultato scadente, come se in campagna si fosse investito un decimo del tempo. Così il venditore fornì a GESI un software diverso, ritirando il precedente. A questo punto, il lavoro sembrò più rapido ma poco versatile e poco preciso dato che alcune operazioni basilari erano di fatto impossibili:
- il posizionamento corretto di un piano
- la generazione di una ortofoto con oggetti in primo e secondo piano
- la generazione di una ortofoto ad alta risoluzione
- la definizione parametrica della vista 3D prospettica o di un piano
- la comoda navigazione interrattiva
Dal momento in cui notammo tutti questi limiti, GESI decise di progettare un proprio software. Dopo 11 mesi nacque lo scheletro di CloudDesigner, migliorato in altri 13 mesi di lavori.
I risultati, fin da subito, furono strabilianti. Questo software riusciva a concludere un lavoro di campagna di una giornata di lavoro con una sola corrispondente giornata di ufficio per il trattamento dati e con soli 4 giga di RAM. I test, furono poi condotti anche su pc portatili non troppo aggressivi, superandoli brillantemente.
Così da prototipo CloudDesigner passa a essere, il nostro software interno per la gestione laser scanner, il tutto a firma GESI.
Motivi
Ecco le 16 caratteristiche che GESI ha ricercato investendo le proprie risorse per la creazione di CloudDesigner:
1. Rototraslazione con interpolazione mediata del centro target
Durante la fase di Sviluppo e Ricerca ci è capitato di identificare con sicurezza che il centro dei target capitava proprio nell’interspazio tra due o più punti, non sapendo cosa succedesse con altri software abbiamo deciso di sviluppare una procedura chiara: è possibile selezionare singolarmente i punti che contribuiscono alla media ovvero quelli al cui centro va ricercato il centro.
2. Rototraslazione con selezione migliorata delle sfere
Le sfere che ci sono state fornite con il Laser Scanner presentavano i poli tronchi e l’equatore inciso: non erano esattamente sfere ma sicuramente erano tra le più facili da reperire in commercio. Pertanto abbiamo deciso di supportarle in qualche modo: abbiamo quindi sviluppato una procedura che rende possibile selezionare un’area della sfera evitando i poli troncati e l’equatore inciso. Grazie a questo algoritmo è anche possibile l’uso di sfere parzialmente occluse.
3. Rapidità nelle operazioni AICP/ICP/Bundle Adjustment
Uno dei primi algoritmi che abbiamo voluto implementare era il Bundle Adjustment dato che prima di Cloud Designer eseguivamo una procedura specifica: non potendo usare ICP con nuvole intere (richiederebbe troppe risorse) dovevamo sottocampionare le nuvole per applicare tale registrazione, tirare fuori le matrici dalle nuvole semplificate registrate e poi applicarle manualmente alle nuvole complete.
L’algoritmo che abbiamo implementato quindi esegue autonomamente un sottocampionamento sul quale poter lavorare ed applica i risultati alle nuvole reali.
4. Registrazione per punti di una singola nuvole da più nuvole già traslate
L’algoritmo di registrazione “Cloud to Cloud” come implementato nei software che abbiamo usato prima di sviluppare Cloud Designer permetteva la semplice ricerca di punti omologhi tra le nuvole. Spesso ci capitava che una singola nuvola da registrare avesse riferimenti già registrati in almeno due nuvole già registrate.
5. Rototraslazione analitica con report
Dopo aver lavorato una campagna Laser Scanner spesso bisognava determinare l’accuratezza globale del rilievo e ciò ci risultava difficile, specialmente dopo aver registrato più volte le nuvole per affinare gli allineamenti. In Cloud Designer abbiamo creato un’area documentale nella quale vi sono tutti i report generati.
6. Misure e note facilmente visibili
Misure e note andrebbero posizionate in 3d in modo da poter essere visualizzate sempre correttamente.
7. Parametrizzazione delle Viste 3D per sovrapposizione con Rendering e fotografie
Talvolta una campagna Laser Scanner può servire per un appoggio fotografico in fase di fotosimulazione. In questo caso è molto utile poter posizionare la Camera in un punto specifico, con una rotazione specifica nello spazio ed un dato angolo FOV. La parametrizzazione delle Viste 3D per come è implementata in Cloud Designer risolve questa esigenza.
8. Vista 3D con camminata interattiva
La Vista 3D non è sempre facile attraverso i vari software. Ci siamo detti che, oltre a muoversi nella scena in maniera interattiva tramite pan e rotazioni orbitali, il modo più facile di navigare nella scena doveva essere quello di centrarsi nella posizione di una scansione, girarsi intorno e camminare. Questa semplicità nei movimenti si è dimostrata vincente in tantissime occasioni.
9. Utilizzo analitico delle Foto panoramiche
L’utilizzo corretto delle Foto Panoramiche è davvero un punto cruciale per la resa fotorealistica delle scansioni in vista interattiva e degli elaborati in uscita.
La procedura prevede la selezione di punti omologhi tra la vista Equirettangolare della scansione e la Foto Panoramica. È per questo che abbiamo investito molto tempo in questa area del software: ogni coppia viene valutata tramite un errore relativo, viene mostrata una accuratezza Massima, Media e Minima.
10. Possibilità di mappature multiple per ciascuna nuvola
La colorazione tramite Foto Panoramiche si presta, volendo, anche all’uso con Fotocamere Termiche o infrarossi.
Avere un supporto per mappature multiple significa poter agganciare varie possibilità di colorimetria e selezionare all’occasione una o l’altra.
11. Gestione Analitica dei Piani di Proiezione (gestione degli angoli di Eulero)
Uno dei punti cruciali in fase di restituzione è la gestione dei Piani di Proiezione.
Non solo volevamo una completa gestione del piano tramite gli angoli di Eulero, ma preferivamo avere anche dei meccanismi di gestione.
12. Livellamento orizzontale, verticale e determinazione dei parallelismi dei Piani
13. Alta risoluzione nell’esportazione di Ortofoto, con interpolazione pixel mancanti
14. Primi e Secondi Piani coerenti nelle Ortofoto
15. Generazione delle ortofoto anche su migliaia di miliardi di punti senza alcun sottocampionamento
16. Supporto per la generazione di Ortofoto da Spaccati ed insiemi limitati di punti